

In questo articolo, vedremo in dettaglio come realizzare un alimentatore DCC++ e come utilizzarlo tramite il software JRMI.
Per la realizzazione di questo progetto sono necessarie le seguenti schede:
- Arduino Uno o in alternativa Arduino MEGA;
- Arduino Motor Shield.
Sono necessari inoltre i seguenti componenti:
- Un doppio deviatore a levetta per commutare le funzioni di “Programmazione” e “Circolazione”;
- Due boccole femmina a banana di colore giallo per collegare l’alimentatore ai binari di circolazione dall’uscita A;
- Due boccole femmina a banana di colore verde per collegare l’alimentatore ai binari di programmazione dall’uscita B;
- Due boccole femmina a banana di colore rosso e nero per collegare la tensione di ingresso di 15 VCC ai terminali VIN;
- 4 LED rossi 5 mm;
- 4 resistenze da 10000 OHM 1/4 di Watt;
- Del filo elettrico per realizzare i due ponticelli visibili in figura.
Collegamenti DCC++
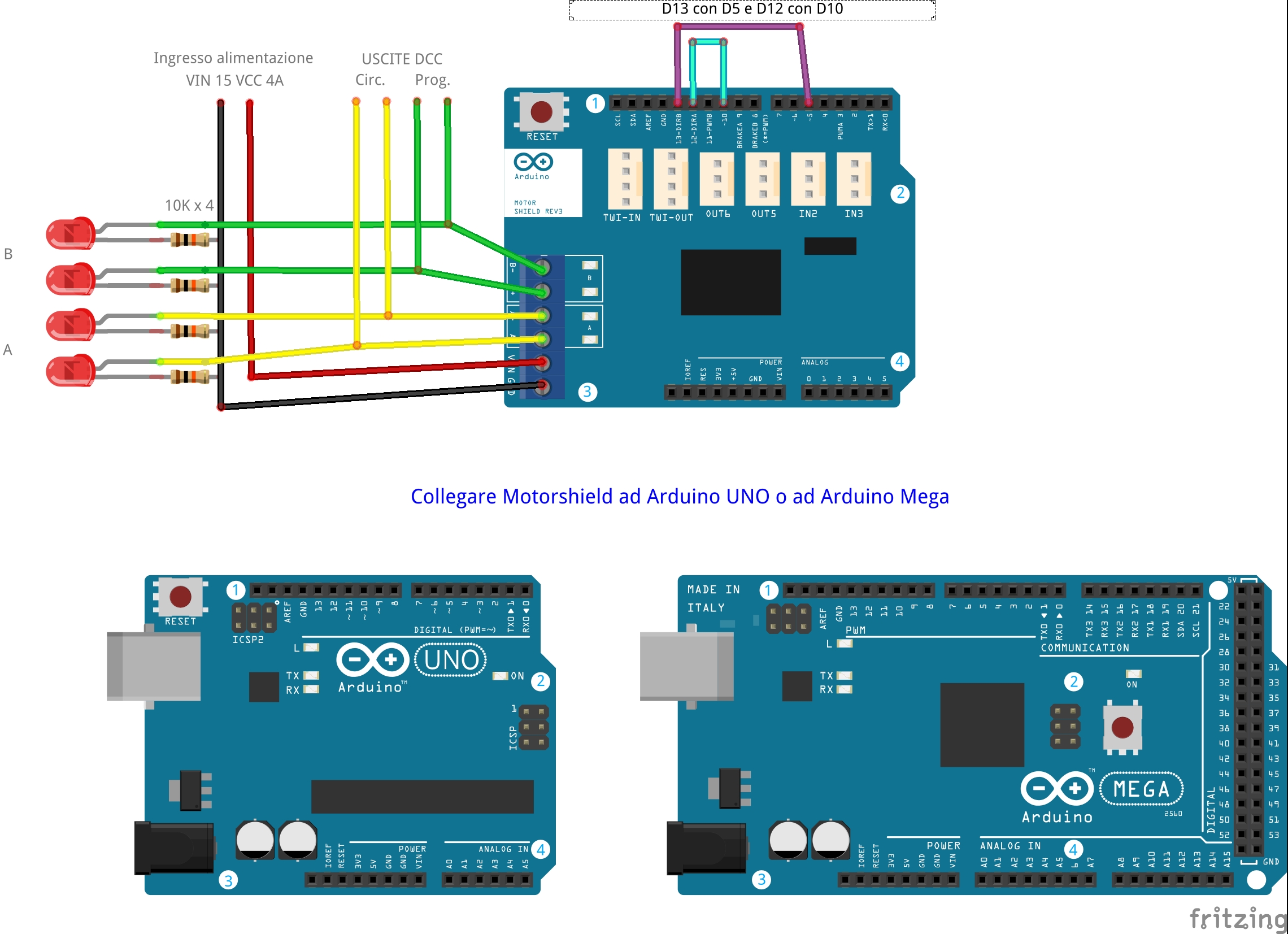
Qui sopra potete vedere lo schema di base per realizzare una centrale DCC++
La scheda Motor shield verrà montata sopra una scheda Arduino UNO o Arduino MEGA in base aile proprie esigenze.
Utilizzando una scheda Arduino UNO, avremo un funzionamento solo ed esclusivamente dedicato alla gestione del sistema DCC++.
Utilizzando una scheda Arduino MEGA, avremo un funzionamento dedicato alla gestione del sistema DCC++ e anche alla gestione di un discreto numero di porte di I/O utili all’automatizzazione di un plastico ferroviario e che non verranno trattate in questo articolo.
Per completare lo schema dovranno essere realizzati due ponticelli come indicato in figura tra il pin D13 e D5 (viola) ed il pin D12 e D10 (ciano).
Questi ponticelli sono necessari per il funzionamento dei canali A e B della scheda Arduino Motorshield.
Nota: Se si utilizza Arduino MEGA al posto di Arduino UNO, eliminare il ponticello di colore ciano (D12 con D10) e collegare il ponticello viola nei pin D13 con D4 come nella figura sottostante.
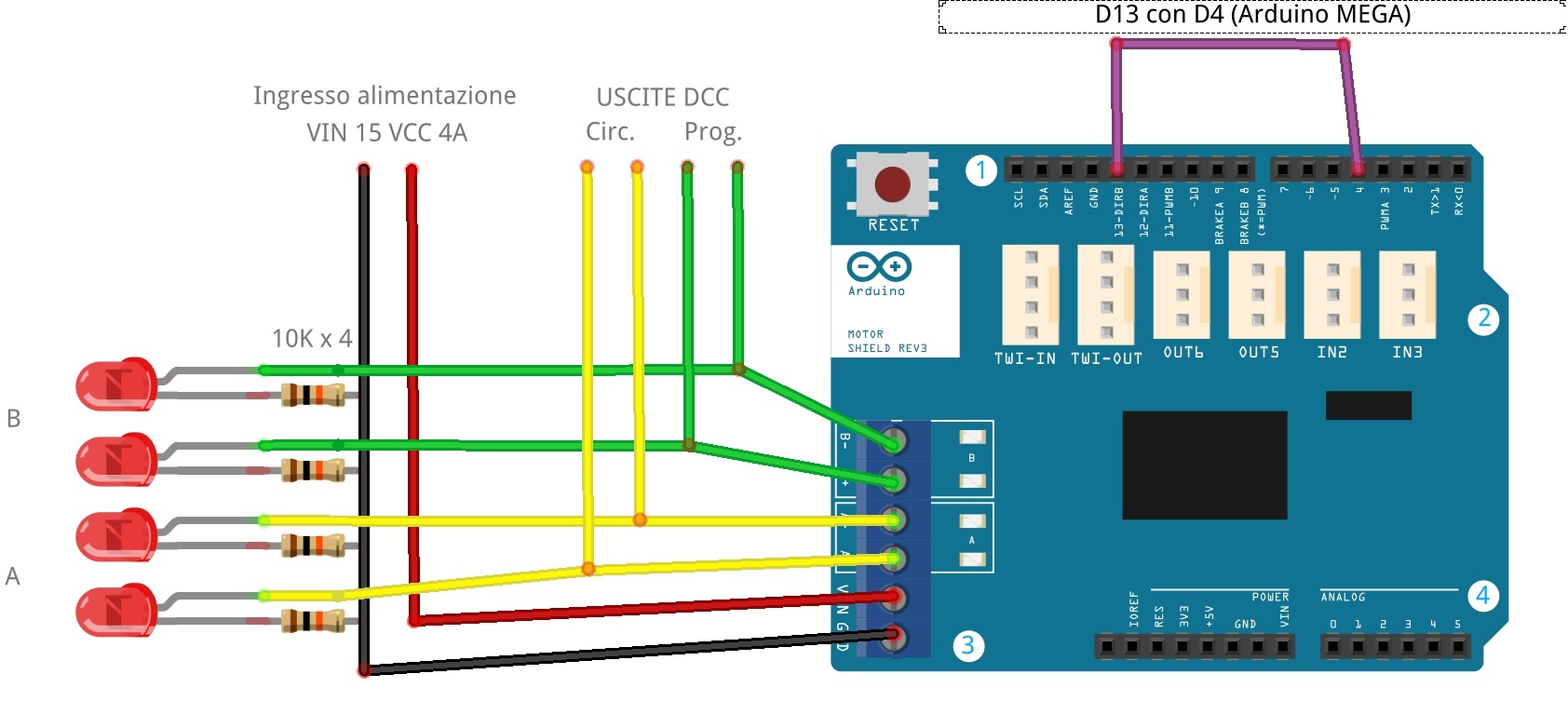
Ponticello per Arduino MEGA
Infine, deve essere effettuata una ultima operazione sotto la scheda Arduino Motorshield.
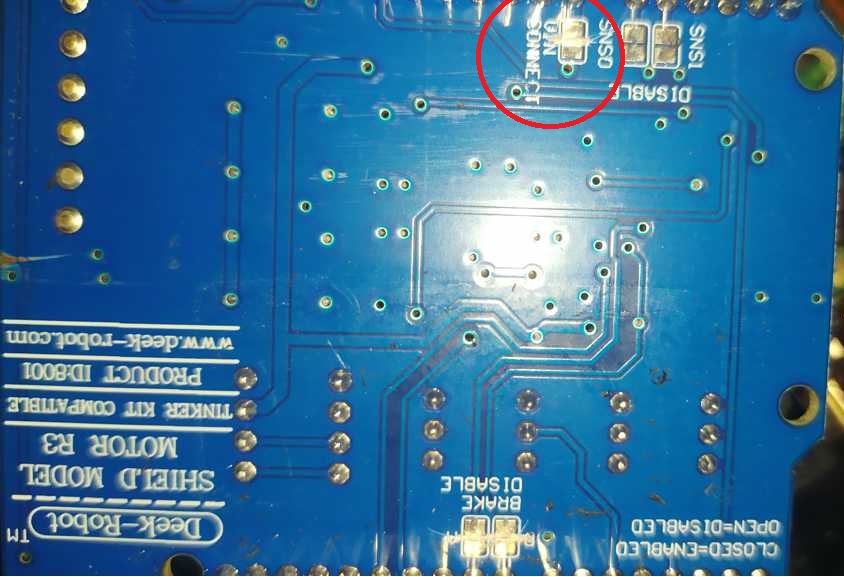
Lato inferiore Arduino Motorshield
Con un cutter, deve essere tagliato il ponticello del pin VIN CONNECT (cerchio rosso) per evitare che la tensione di 15 VCC presente sui terminali VIN vada in conflitto con la tensione di alimentazione interna di Arduino.
Sulla scheda Arduino Motorshield, sono presenti 4 led rossi per indicare che sulle uscite A e B è presente o meno la tensione di uscita verso i binari.
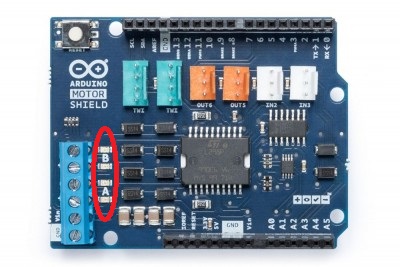
led uscite A e B
Se si inserisce il circuito all’interno di un mobiletto, tali led non si potranno vedere.

Pannello frontale
I 4 led rotondi da 5 mm e le 4 resistenze da 10000 OHM visualizzati in figura sono facoltativi e andranno montati sul pannello frontale del mobiletto come spie di alimentazione per le uscite A e B.
Colleghiamo un doppio deviatore a levetta per commutare l’uscita B (programmazione) sulle boccole gialle A (circolazione).
 In questo modo, possiamo programmare una loco senza toglierla dal tracciato del plastico.
In questo modo, possiamo programmare una loco senza toglierla dal tracciato del plastico.
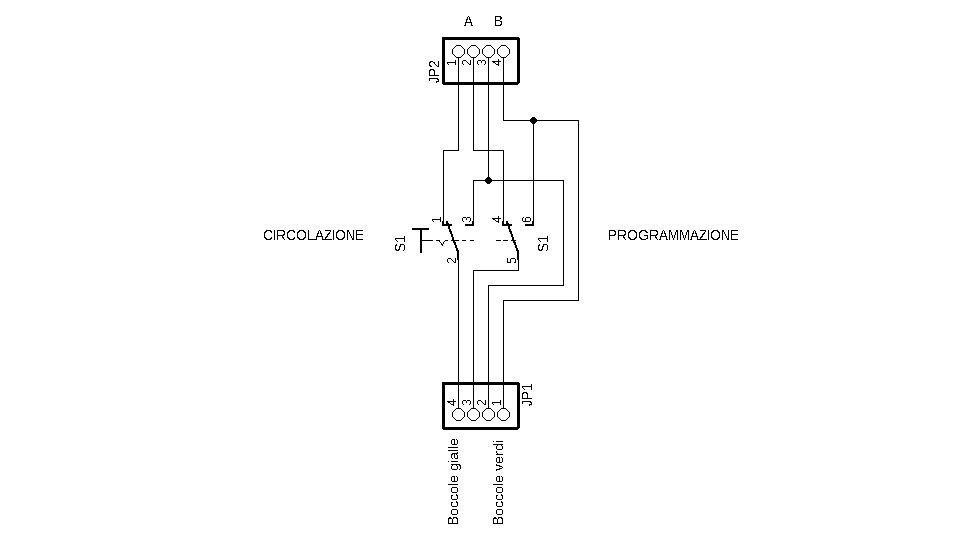
Schema elettrico
Software:
Il software da caricare su Arduino tramite il suo IDE si chiama BaseStation e lo trovate su GitHub.
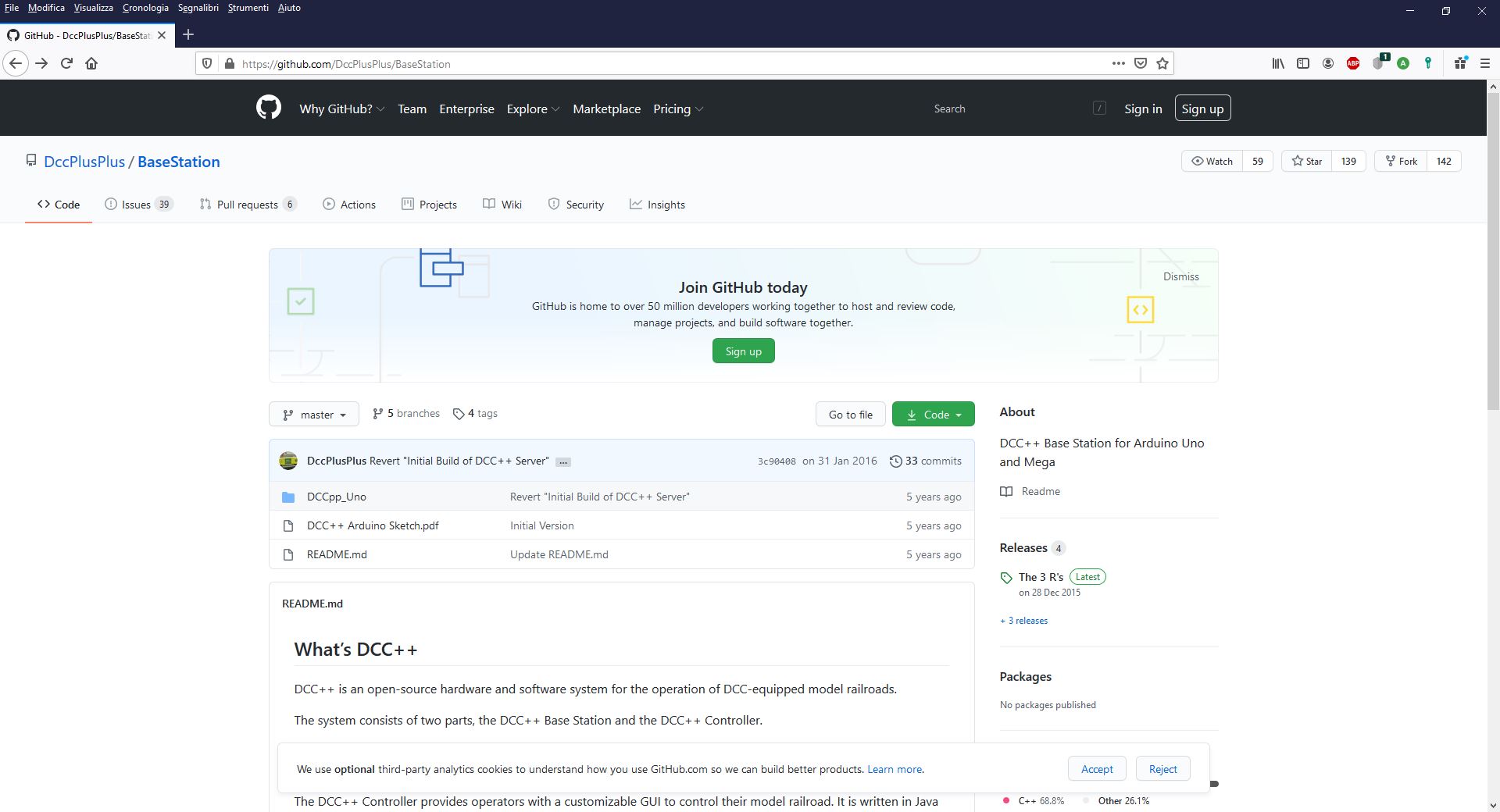
Cliccare su Code e poi su Download ZIP.
Il file del programma da usare è il file INO DCCpp_Uno presente all’interno della cartella BaseStation-master.
Una volta che la programmazione di Arduino è andata a buon fine, possiamo fare un test di funzionamento del software aprendo il monitor seriale per inviare qualche comando all’hardware.
All’apertura del monitor seriale dovrebbe comparire questo messaggio:
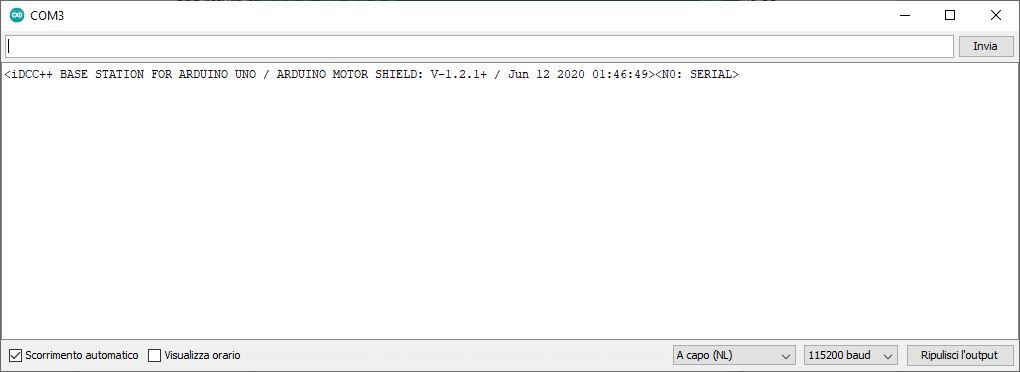
Aperture monitor seriale
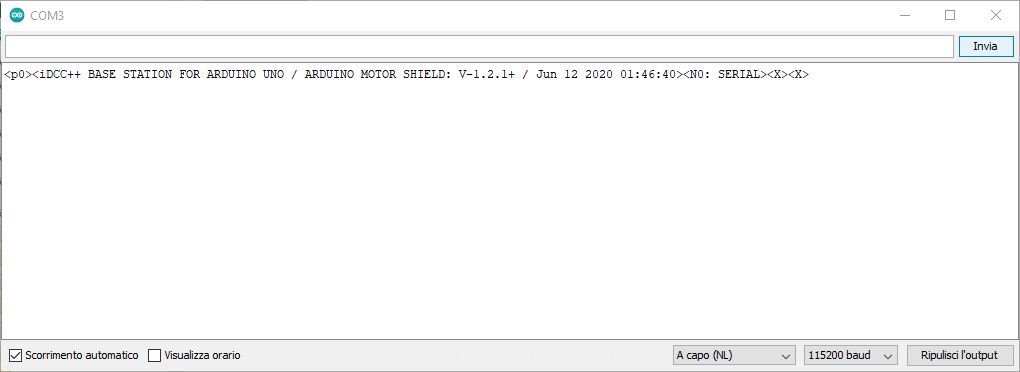
Nella parte alta di invio inserire il comando <s> e se tutto funziona correttamente dovrebbe comparire il seguente messaggio:
 Ora, colleghiamo un alimentatore da 15 VCC 4 Ampere ai fili rosso e nero; VIN della scheda Arduino Motorshield e inviamo il comando <1> sul monitor seriale.
Ora, colleghiamo un alimentatore da 15 VCC 4 Ampere ai fili rosso e nero; VIN della scheda Arduino Motorshield e inviamo il comando <1> sul monitor seriale.
I 4 led dei canali A e B di uscita si devono accendere.
Per spegnerli inviamo il comando <0>.
La lista completa dei comandi la troviamo nel file PDF della cartella BaseStation:
<t>: sets the throttle for a mobile engine decoder using 128-step speeds
<f>: controls mobile engine decoder functions F0-F28
<a>: controls stationary accessory decoders
<T>: controls turnouts connected to stationary accessory decoders
<w>: writes a configuration variable byte to an engine decoder on the main ops track
<b>: sets/clear a configuration variable bit in an engine decoder on the main operations track
<W>: writes a configuration variable byte to an engine decoder on the programming track
<B>: sets/clear a configuration variable bit in an engine decoder on the programming track
<R>: reads a configuration variable byte from an engine decoder on the programming track
<1>: turns on track power
<0>: turns off track power
<c>: reads current draw from main operations track
<s>: returns status messages, including power state, turnout states, and sketch versionà
Installiamo il software JRMI sul nostro computer
JRMI A Java Model Railroad Interface:
JMRI è inteso come un punto di partenza per gli hobbisti che desiderano controllare i propri layout con un computer senza dover creare un intero sistema da zero. Puoi gestire il funzionamento delle tue locomotive e programmare facilmente i tuoi decoder utilizzando DecoderPro®.
Questo software esiste per diversi sistemi operativi e piattaforme hardware che possiamo vedere qui.

Sito JRMI
La versione per Windows la trovate qui:

JRMI Versione WIN
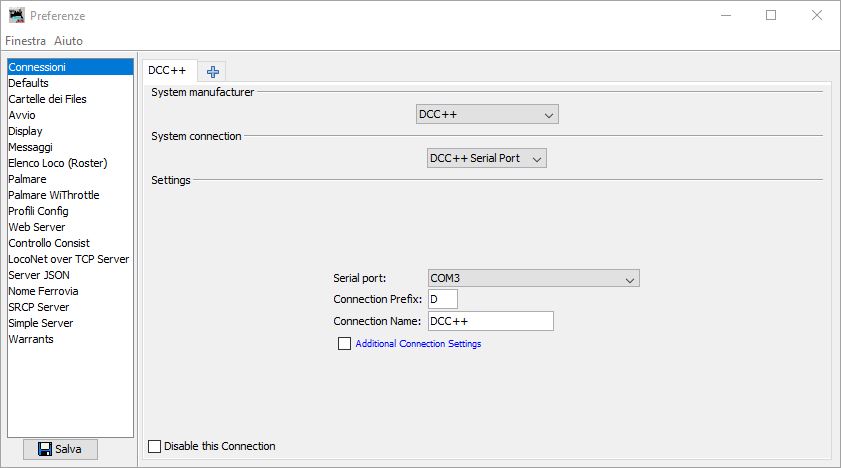
All’avvio di JRMI dovrebbe comparire un wizard per la procedura guidata del setup del programma.
In alternativa andate su Modifica/Preferenze ed impostate i corretti valori in vostro possesso per ‘Connessioni’ e porta COM.
ROSTER:
Il Roster è un elenco delle locomotive che intendiamo usare e programmare con JRMI. Tale elenco contiene tutti i parametri di programmazione delle nostre loco. Il Roster va creato.
Dal menù ‘File’ selezionare ‘Nuova Finestra Roster’, poi cliccare sul pulsante +Nuova Loco in alto a sinistra.
Si aprirà una finestra ‘Crea nuova loco’.
Se abbiamo alimentato il tracciato (pulsante in alto a sx da rosso a verde), possiamo interrogare il decoder della loco premendo ‘Leggi Tipo dal decoder’.
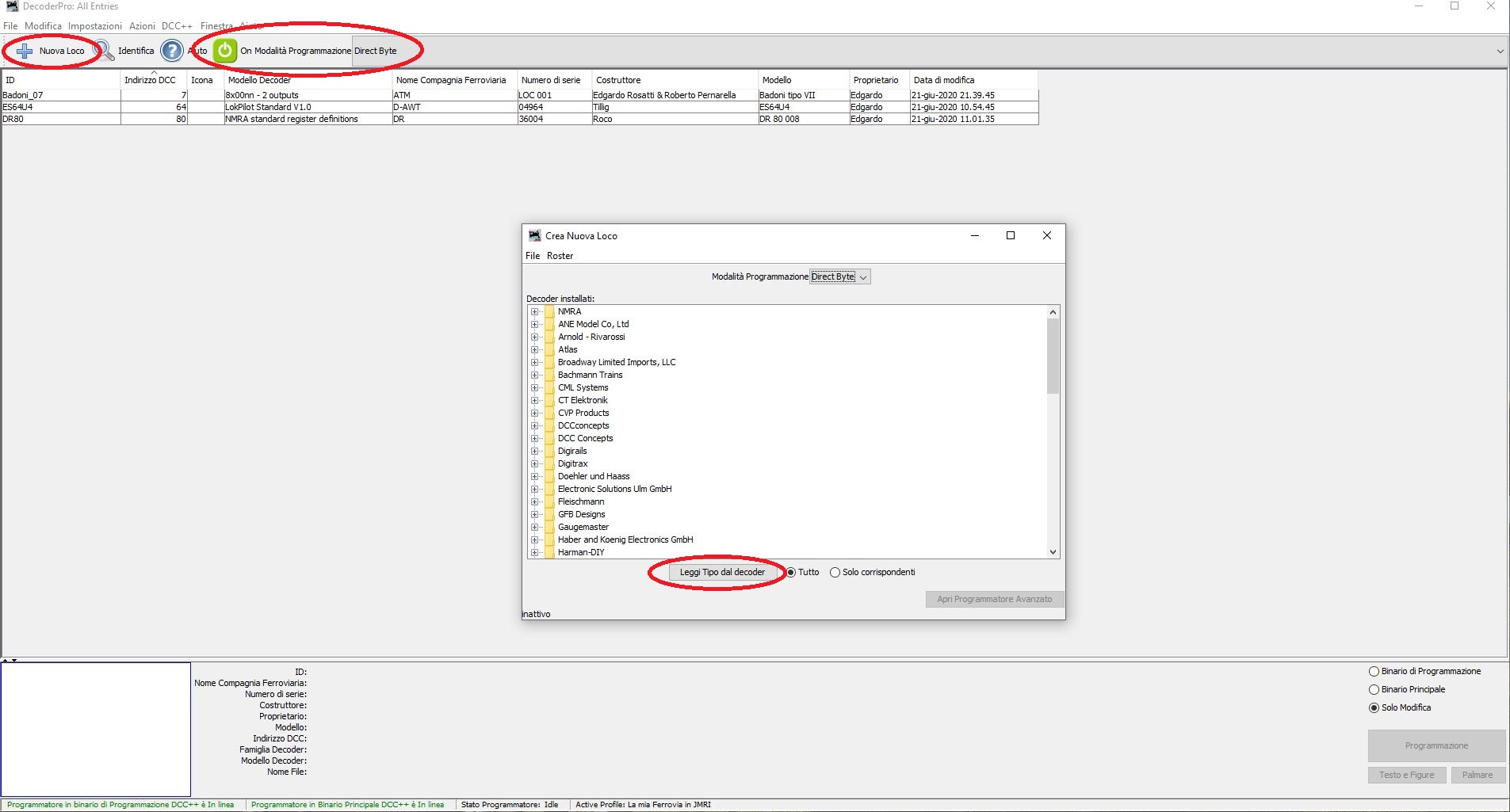
Roster
Funzionamento di una o più loco:
Cliccare su una loco nell’elenco del Roster selezionare ‘Palmare’ in basso a destra.
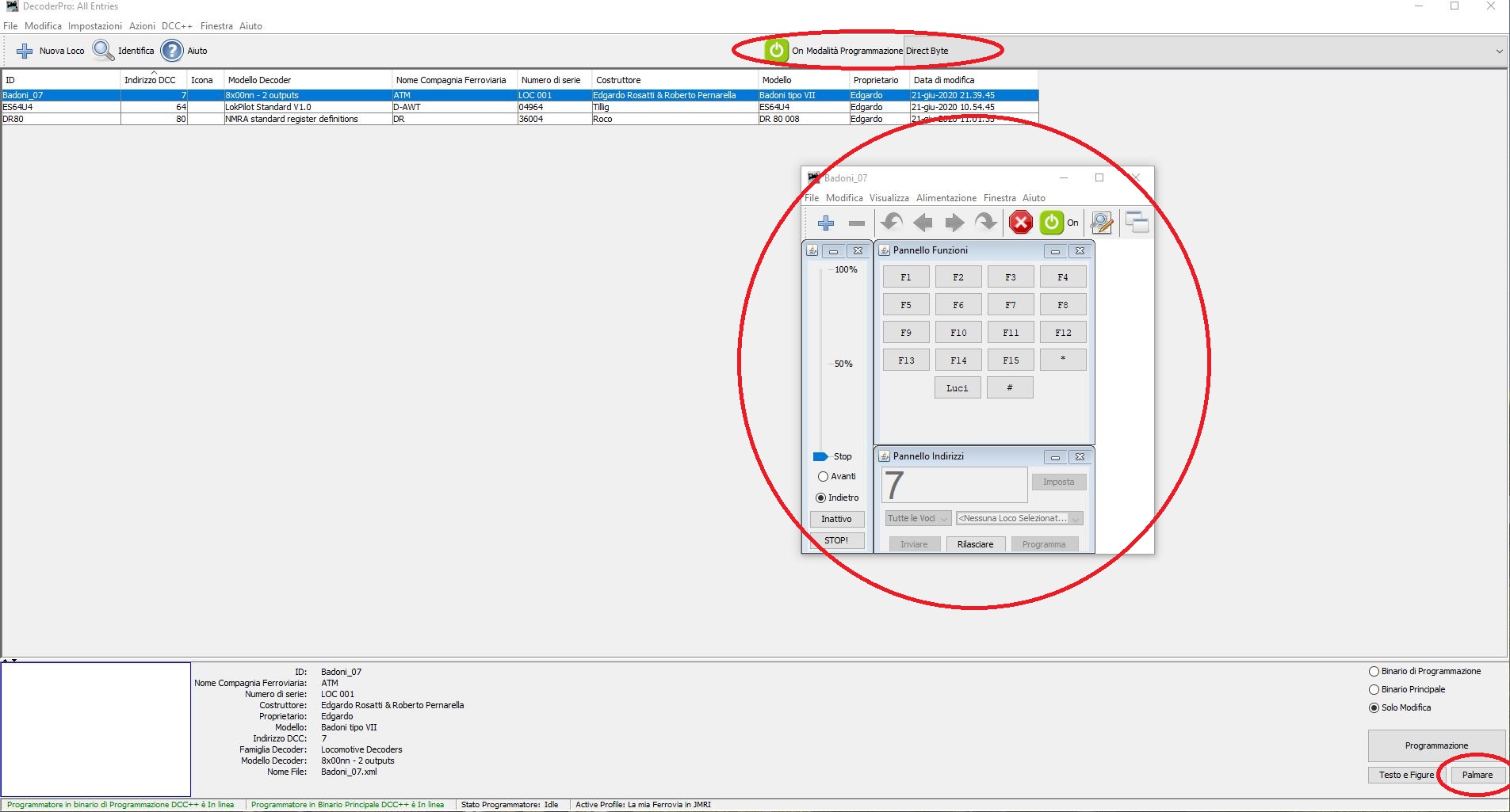 É possibile aprire più palmari per gestire il funzionamento di più locomotove.
É possibile aprire più palmari per gestire il funzionamento di più locomotove.
Nella parte 2, vedremo come ampliare le potenzialità del DCC++ con Raspberry, smartpone e WI FI.